This work is licensed under a Creative Commons Attribution 3.0
Unported License.
http://creativecommons.org/licenses/by/3.0/legalcode
Erasure Code Support¶
This is a living document to be updated as the team iterates on the design therefore all details here reflect current thinking however are subject to change as development progresses. The team makes use of Trello to track more real-time discussions activities that, as details/thoughts emerge, are captured in this document.
The Trello discussion board can be found at this link. Major remaining tasks are identified by a number that can be found in a corresponding Trello card. Outstanding tasks are listed at the end of each section in this document As this doc is updated and/or Trello cards are completed please be sure to update both places.
WIP Revision History:
- 7/25, updated meta picture, specify that object metadata is system, redo reconstructor section
- 7/31, added traceability to trello cards via section numbers and numbered task items, added a bunch of sections
- 8/5, updated middleware section, container_sync section, removed 3.3.3.7 as dup, refactoring section, create common interface to proxy nodes, partial PUT hency on obj sysmet patch, sync’d with trello
- 8/23, many updates to reconstructor section based on con-call from 8/22. Also added notes about not deleting on PUT where relevant and updated sections referencing closed Trello cards
- 9/4, added section in reconstructor on concurrency
- 10/7, reconstructor section updates - lots of them
- 10/14, more reconstructor section updates, 2 phase commit intro - misc typos as well from review
- 10/15, few clarifications from F2F review and bigger rewording/implementation change for what was called 2 phase commit
- 10/17, misc clarifying notes on .durable stuff
- 11/13: IMPORANT NOTE: Several aspects of the reconstructor are being re-worked; the section will be updated ASAP
- 12/16: reconstructor updates, few minor updates throughout.
- 2/3: reconstructor updates
- 3/23: quick scrub to bring things in line w/current implementation
- 4/14: Ec has been merged to master. Some parts of this spec are no longer the authority on the design, please review code on master and user documentation.
1. Summary¶
EC is implemented in Swift as a Storage Policy, see docs for complete details on Storage Policies.
EC support impacts many of the code paths and background operations for data stored in a container that was created with an EC policy however this is all transparent to users of the cluster. In addition to fully leveraging the Storage Policy framework, the EC design will update the storage policy classes such that new policies, like EC, will be sub classes of a generic base policy class. Major code paths (PUT/GET) are updated to accommodate the different needs to encode/decode versus replication and a new daemon, the EC reconstructor, performs the equivalent jobs of the replicator for replication processes. The other major daemons remain, for the most part, unchanged as another key concept for EC is that EC fragments (see terminology section below) are seen as regular objects by the majority of services thus minimizing the impact on the existing code base.
The Swift code base doesn’t include any of the algorithms necessary to perform the actual encoding and decoding of data; that is left to an external library. The Storage Policies architecture is leveraged to allow EC on a per container basis and the object rings still provide for placement of EC data fragments. Although there are several code paths that are unique to an operation associated with an EC policy, an external dependency to an Erasure Code library is what Swift counts on to perform the low level EC functions. The use of an external library allows for maximum flexibility as there are a significant number of options out there, each with its owns pros and cons that can vary greatly from one use case to another.
2. Problem description¶
The primary aim of EC is to reduce the storage costs associated with massive amounts of data (both operating costs and capital costs) by providing an option that maintains the same, or better, level of durability using much less disk space. See this study for more details on this claim.
EC is not intended to replace replication as it may not be appropriate for all usage models. We expect some performance and network usage tradeoffs that will be fully characterized once sufficient code is in place to gather empirical data. Current thinking is that what is typically referred to as ‘cold storage’ is the most common/appropriate use of EC as a durability scheme.
3. Proposed change¶
3.1 Terminology¶
The term ‘fragment’ has been used already to describe the output of the EC process (a series of fragments) however we need to define some other key terms here before going any deeper. Without paying special attention to using the correct terms consistently, it is very easy to get confused in a hurry!
- segment: not to be confused with SLO/DLO use of the work, in EC we call a segment a series of consecutive HTTP chunks buffered up before performing an EC operation.
- fragment: data and parity ‘fragments’ are generated when erasure coding transformation is applied to a segment.
- EC archive: A concatenation of EC fragments; to a storage node this looks like an object
- ec_k: number of EC data fragments (k is commonly used in the EC community for this purpose)
- ec_m: number of EC parity fragments (m is commonly used in the EC community for this purpose)
- chunk: HTTP chunks received over wire (term not used to describe any EC specific operation)
- durable: original data is available (either with or without reconstruction)
- quorum: the minimum number of data + parity elements required to be able to guarantee the desired fault tolerance, which is the number of data elements supplemented by the minimum number of parity elements required by the chosen erasure coding scheme. For example,for Reed-Soloman, the minimum number parity elements required is 1, and thus the quorum_size requirement is ec_ndata + 1. Given the number of parity elements required is not the same for every erasure coding scheme, consult PyECLib for min_parity_fragments_needed()
- fully durable: all EC archives are written and available
3.2 Key Concepts¶
- EC is a Storage Policy with its own ring and configurable set of parameters. The # of replicas for an EC ring is the total number of data plus parity elements configured for the chosen EC scheme.
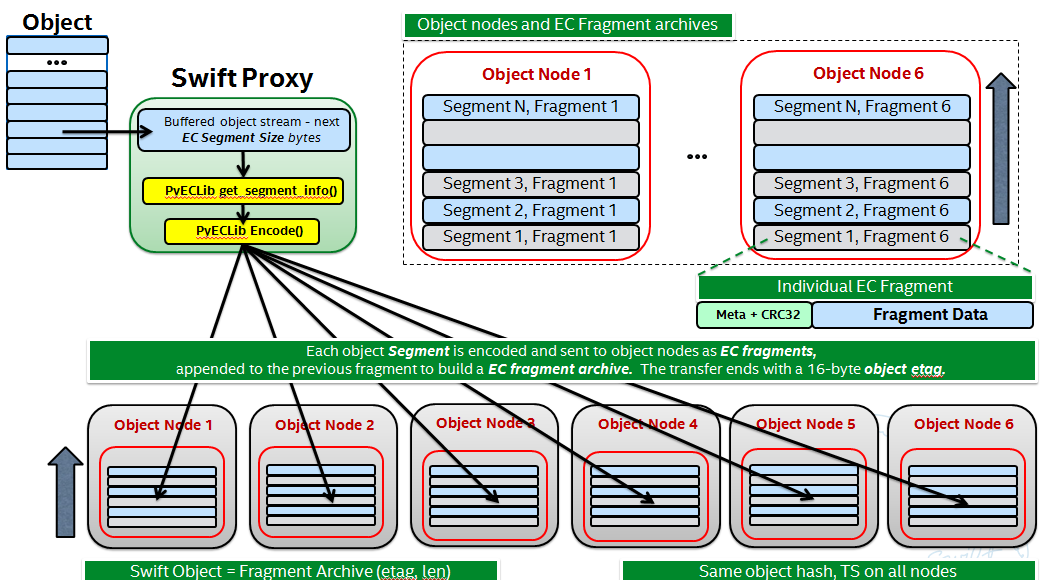
- Proxy server buffers a configurable amount of incoming data and then encodes it via PyECLib we called this a ‘segment’ of an object.
- Proxy distributes the output of the encoding of a segment to the various object nodes it gets from the EC ring, we call these ‘fragments’ of the segment
- Each fragment carries opaque metadata for use by the PyECLib
- Object metadata is used to store meta about both the fragments and the objects
- An ‘EC Archive’ is what’s stored on disk and is a collection of fragments appended
- The EC archives container metadata contains information about the original object, not the EC archive
- Here is a 50K foot overview:
3.3 Major Change Areas¶
Dependencies/Requirements
See template section at the end
3.3.1 Storage Policy Classes
The feature/ec branch modifies how policies are instantiated in order to Support the new EC policy.
Trello Tasks for this section:
3.3.1.2: Make quorum a policy based function (IMPLEMENTED)
3.3.2 Middleware
Middleware remains unchanged. For most middleware (e.g., SLO/DLO) the fact that the proxy is fragmenting incoming objects is transparent. For list endpoints, however, it is a bit different. A caller of list endpoints will get back the locations of all of the fragments. The caller will be unable to re-assemble the original object with this information, however the node locations may still prove to be useful information for some applications.
3.3.3 Proxy Server
Early on it did not appear that any major refactoring would be needed to accommodate EC in the proxy, however that doesn’t mean that its not a good opportunity to review what options might make sense right now. Discussions have included:
- should we consider a clearer line between handing incoming requests and talking to the back-end servers? Yes, it makes sense to do this. There is a Trello card tracking this work and it covered in a section later below.
- should the PUT path be refactored just because its huge and hard to follow? Opportunistic refactoring makes sense however its not felt that it makes sense to combine a full refactor of PUT as part of this EC effort. YES! This is active WIP.
- should we consider different controllers (like an ‘EC controller’)? Well, probably... YES This is active WIP.
The following summarizes proxy changes to support EC:
TODO: there are current discussion underway on Trello that affect both of these flows
- Basic flow for a PUT:
- Proxy opens (ec_k + ec_m) backend requests to object servers
- Proxy buffers HTTP chunks up-to a minimum segment size (defined at 1MB to start with)
- Proxy feeds the assembled segment to PyECLib’s encode() to get ec_k + ec_m fragments
- Proxy sends the (ec_k + ec_m) fragments to the object servers to be _appended_ to the previous set
- Proxy then continues with the next set of HTTP chunks
- Object servers store objects which are EC archives (their contents are the concatenation of erasure coded fragments)
- Object metadata changes: for ‘etag’, we store the md5sum of the EC archive object, as opposed to the non-EC case where we store md5sum of the entire object
- Upon quorum of response and some minimal (2) number of commit confirmations, responds to client
- Upon receipt of the commit message (part of a MIME conversation) storage nodes store 0 byte data file as timestamp.durable for respective object
- Proxy HTTP PUT request handling changes
- Intercept EC request based on policy type
- Validate ring replica count against (ec_k + ec_m)
- Calculate EC quorum size for min_conns
- Call into PyEClib to encode to client_chunk_size sized object chunks to generate (ec_k + ec_m) EC fragments.
- Queue chunk EC fragments for writing to nodes
- Introduce Multi-phase Commit Conversation
- Basic flow for a GET:
- Proxy opens ec_k backend concurrent requests to object servers. See Trello card 3.3.3.3
- Proxy would 1) validates the number of successful connections >= ec_k 2) checks the avaiable fragment archives responsed by obj-server are the same version. 3) continue searching from the hand-off nodes (ec_k + ec_m) if not enough data found. See Trello card 3.3.3.6
- Proxy reads from the first ec_k fragment archives concurrently.
- Proxy buffers the content to a segment up-to the minimum segment size.
- Proxy feeds the assembled segment to PyECLib’s decode() to get the original content.
- Proxy sends the original content to Client.
- Proxy then continues with the next segment of contents.
Proxy HTTP GET request handling changes
TODO - add high level flow
Partial PUT handling
NOTE: This is active WIP on trello.
When a previous PUT fails in the middle, for whatever reason and regardless of how the response was sent to the client, there can be various scenarios at the object servers that require the proxy to make some decisions about what to do. Note that because the object servers will not return data for .data files that don’t have a matching .durable file, its not possible for the proxy to get un-reconstrucable data unless there’s a combination of a partial PUT and a rebalance going on (or handoff scenario). Here are the basic rules for the proxy when it comes to interpreting its responses when they are mixed:
If I have all of one timestamp, feed to PyECLib
If PYECLib says OK
I'm done, move on to next segment
Else
Fail the request (had sufficient segments but something bad happened)
Else I have a mix of timestamps;
Because they all have to be recosntructable, choose the newest
Feed to PYECLib
If PYECLib says OK
Im done, move on to next segment
Else
Its possible that the newest timestamp I chose didn't have enough segments yet
because, although each object server claims they're reconstructable, maybe
a rebalance or handoff situation has resulted in some of those .data files
residing elsewhere right now. In this case, I want to look into the
available timestamp headers that came back with the GET and see what else
is reconstructable and go with that for now. This is really a corner case
because we will restrict moving partitions around such that enough archives
should be found at any given point in time but someone might move too quickly
so now the next check is...
Choose the latest available timestamp in the headers and re-issue GET
If PYECLib says OK
I'm done, move on to next segment
Else
Fail the request (had sufficient segments but something bad happened) or
we can consider going to the next latest header....
Region Support
For at least the initial version of EC, it is not recommended that an EC scheme span beyond a single region, Neither performance nor functional validation will be been done in in such a configuration.
Trello Tasks for this section:
* 3.3.3.5: CLOSED
- 3.3.3.9: Multi-Phase Commit Conversation
In order to help solve the local data file cleanup problem, a multi-phase commit scheme is introduced for EC PUT operations (last few steps above). The implementation will be via MIME documents such that a conversation between the proxy and the storage nodes is had for every PUT. This provides us with the ability to handle a PUT in one connection and assure that we have “the essence” of a 2 phase commit, basically having the proxy communicate back to the storage nodes once it has confirmation that all fragment archives in the set have been committed. Note that we still require a quorum of data elements of the conversation to complete before signaling status to the client but we can relax that requirement for the commit phase such that only 2 confirmations to that phase of the conversation are required for success. More will be said about this in the reconstructor section.
Now the storage node has a cheap indicator of the last known durable set of fragment archives for a given object on a successful durable PUT. The reconstructor will also play a role in the managing of the .durable files, either propagating it or creating one post-reconstruction. The presence of a ts.durable file means, to the object server, “there is a set of ts.data files that are durable at timestamp ts.” See reconstructor section for more details and use cases on .durable files. Note that the completion of the commit phase of the conversation is also a signal for the object server to go ahead and immediately delete older timestamp files for this object (for EC they are not immediately deleted on PUT). This is critical as we don’t want to delete the older object until the storage node has confirmation from the proxy, via the multi-phase conversation, that the other nodes have landed enough for a quorum.
On the GET side, the implication here is that storage nodes will return the TS with a matching .durable file even if it has a newer .data file. If there exists a .data file on one node without a .durable file but that same timestamp has both a .data and a .durable on another node, the proxy is free to use the .durable timestamp series as the presence of just one .durable in the set indicates that the object has integrity. In the even that a serires of .data files exist without a .durable file, they will eventually be deleted by the reconstructor as they will be considered partial junk that is unreconstructable (recall that 2 .durables are required for determining that a PUT was successful).
Note that the intention is that this section/trello card covers the multi-phase commit implementation at both proxy and storage nodes however it doesn’t cover the work that the reconstructor does with the .durable file.
A few key points on the .durable file:
- the .durable file means “the matching .data file for this has sufficient fragment archives somewhere, committed, to reconstruct the object”
- the proxy server will never have knowledge (on GET or HEAD) or the existence of a .data file on an object server if it doesn’t have a matching .durable file
- the object server will never return a .data that doesn’t have a matching .durable
- the only component that messes with .data files that don’t have matching .durable files is the reconstructor
- when a proxy does a GET, it will only receive fragment archives that have enough present somewhere to be reconstructed
3.3.3.8: Create common interface for proxy–>nodes
NOTE: This ain’t gonna happen as part of the EC effort
Creating a common module that allows for abstracted access to the a/c/s nodes would not only clean up much of the proxy IO path but would also prevent the introduction of EC from further complicating, for example, the PUT path. Think about an interface that would let proxy code perform generic actions to a back-end node regardless of protocol. The proposed API should be updated here and reviewed prior to implementation and its felt that it can be done in parallel with existing EC proxy work (no dependencies, that work i small enough it can be merged).
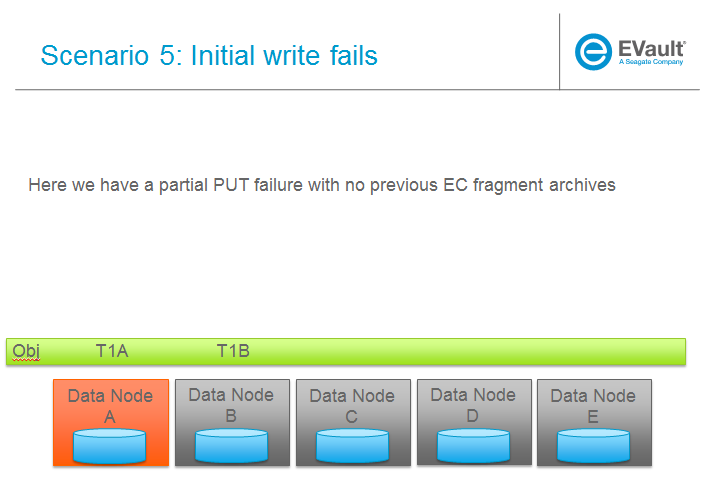
3.3.3.6: Object overwrite and PUT error handling
What’s needed here is a mechanism to assure that we can handle partial write failures. Note: in both cases the client will get a failure back however without additional changes, each storage node that saved a EC fragment archive will effectively have an orphan.
- less than a quorum of nodes is written
- quorum is met but not all nodes were written
and in both cases there are implications to both PUT and GET at both the proxy and object servers. Additionally, the reconstructor plays a role here in cleaning up and old EC archives that result from the scheme described here (see reconstructor for details).
High Level Flow
- If storing an EC archive fragment, the object server should not delete older .data file unless it has a new one with a matching .durable.
- When the object server handles a GET, it needs to send header to the proxy that include all available timestamps for the .data file
- If the proxy determines is can reconstruct the object with the latest timestamp (can reach quorum) it proceeds
- If quorum cant be reached, find timestamp where quorum can be reached, kill existing connections (unless the body of that request was the found timestamp), and make new connections requesting the specific timestamp
- On GET, the object server needs to support requesting a specific timestamp (eg ?timestamp=XYZ)
Trello Tasks for this section:
* 3.3.3.1: CLOSED
* 3.3.3.2: Add high level GET flow
* 3.3.3.3: Concurrent connects to object server on GET path in proxy server
* 3.3.3.4: CLOSED
* 3.3.3.5: Region support for EC
* 3.3.3.6 EC PUTs should not delete old data files (in review)
* 3.3.3.7: CLOSED
* 3.3.3.8: Create common interface for proxy-->nodes
* 3.3.3.9: Multi-Phase Commit Conversation
3.3.4 Object Server
TODO - add high level flow
Trello Tasks for this section:
* 3.3.4.1: Add high level Obj Serv modifications
* 3.3.4.2: Add trailer support (affects proxy too)
3.3.5 Metadata
NOTE: Some of these metadata names are different in the code...
Additional metadata is part of the EC design in a few different areas:
- New metadata is introduced in each ‘fragment’ that is opaque to Swift, it is used by PyECLib for internal purposes.
- New metadata is introduced as system object metadata as shown in this picture:
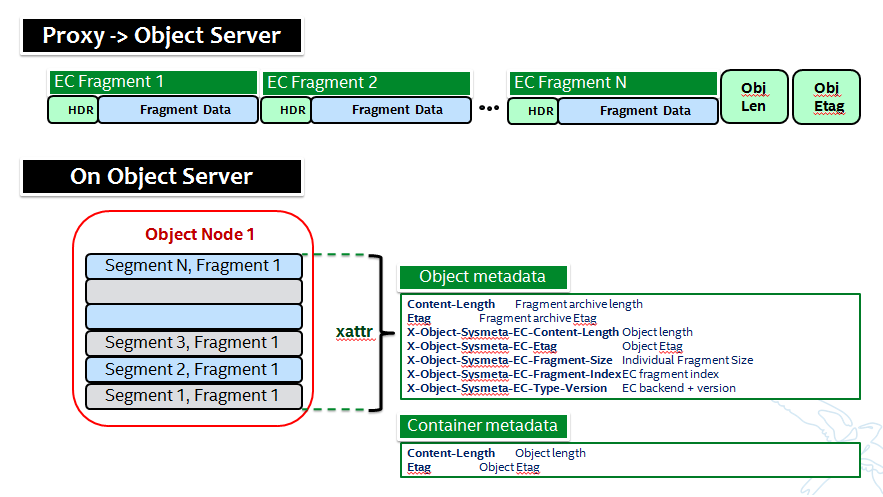
The object metadata will need to be stored as system metadata.
Trello Tasks for this section:
* 5.1: Enable sysmeta on object PUT (IMPLEMENTED)
3.3.6 Database Updates
We don’t need/want container updates to be sent out by every storage node participating in the EC set and actually that is exactly how it will work without any additional changes, see _backend_requests() in the proxy PUT path for details.
3.3.7 The Reconstructor
Overview
The key concepts in the reconstructor design are:
- Focus on use cases that occur most frequently:
- Recovery from disk drive failure
- Rebalance
- Ring changes and revertible handoff case
- Bit rot
- Reconstruction happens at the EC archive level (no visibility into fragment level for either auditing or reconstruction)
- Highly leverage ssync to gain visibility into which EC archive(s) are needed (some ssync mods needed, consider renaming the verb REPLICATION since ssync can be syncing in different ways now
- Minimal changes to existing replicator framework, auditor, ssync
- Implement as new reconstructor daemon (much reuse from replicator) as there will be some differences and we will want separate logging and daemon control/visibility for the reconstructor
- Nodes in the list only act on their neighbors with regards to reconstruction (nodes don’t talk to all other nodes)
- Once a set of EC archives has been placed, the ordering/matching of the fragment index to the index of the node in the primary partition list must be maintained for handoff node usage
- EC archives are stored with their fragment index encoded in the filename
Reconstructor framework
The current implementation thinking has the reconstructor live as its own daemon so that it has independent logging and controls. Its structure borrows heavily from the replicator.
The reconstructor will need to do a few things differently than the replicator, above and beyond the obvious EC functions. The major differences are:
- there is no longer the concept of 2 job processors that either sync or revert, instead there is a job pre-processor that figures out what needs to be done and one job processor carries out the actions needed
- syncs only with nodes to the left and right on the partition list (not with all nodes)
- for reversion, syncs with as many nodes as needed as determined by the fragment indexes that it is holding; the number of nodes will be equivalent to the number of unique fragment indexes that it is holding. It will use those indexes as indexes into the primary node list to determine which nodes to sync to.
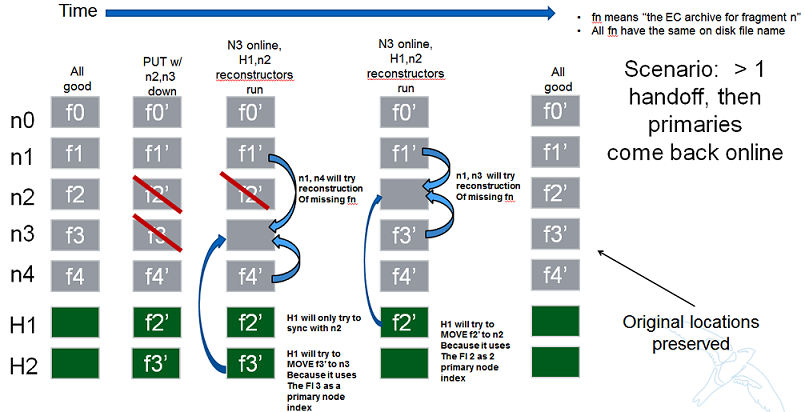
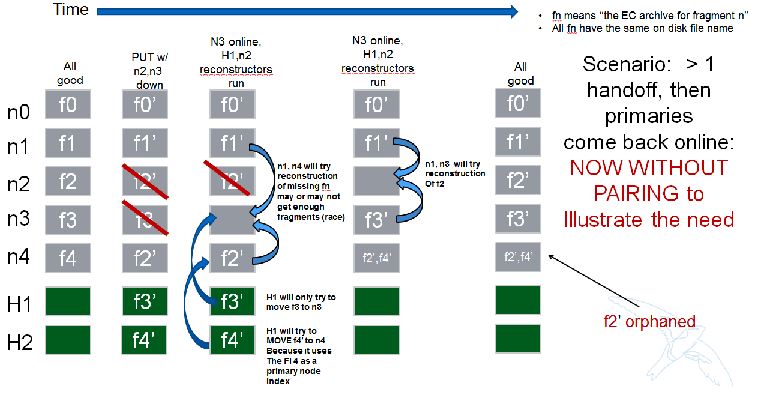
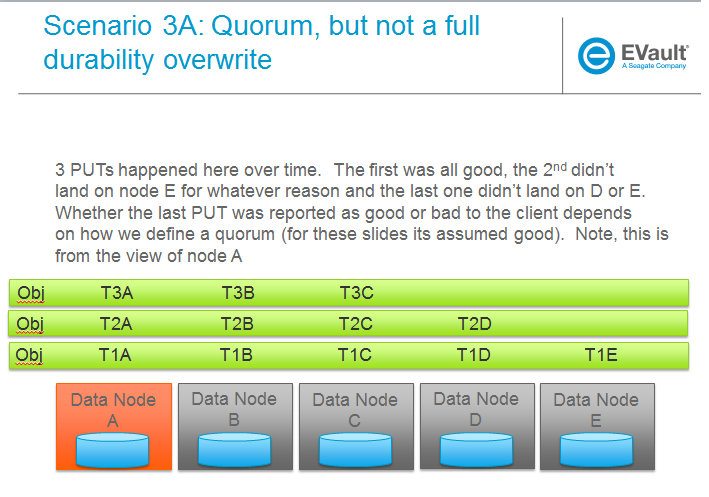
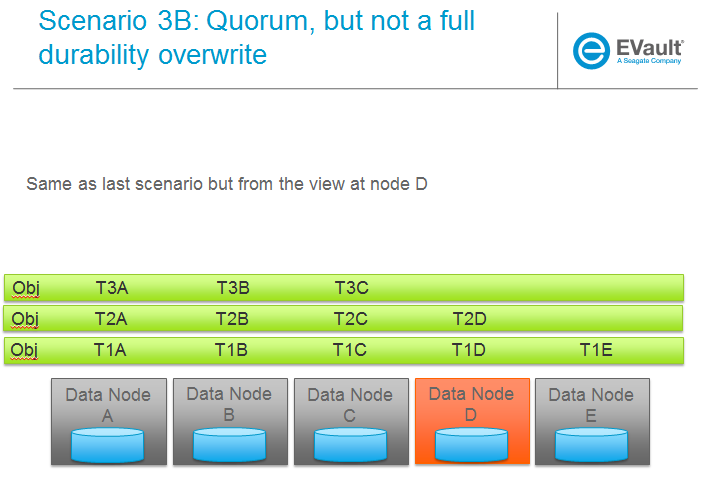
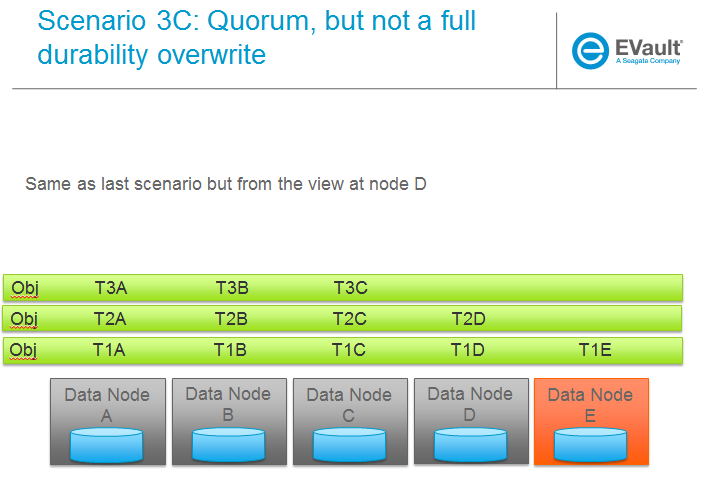
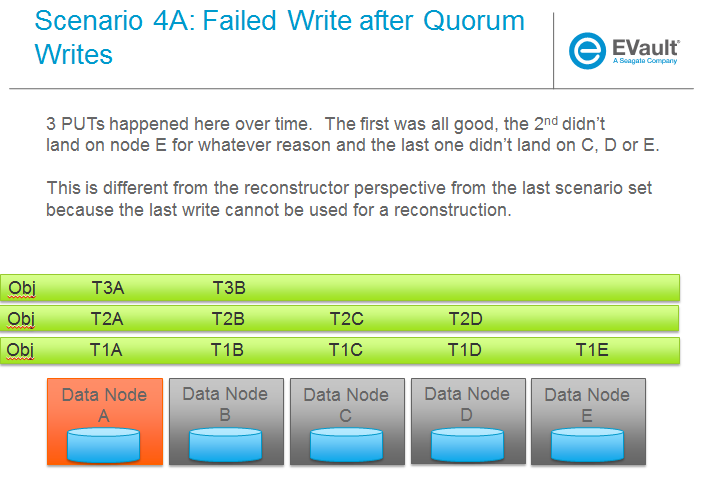
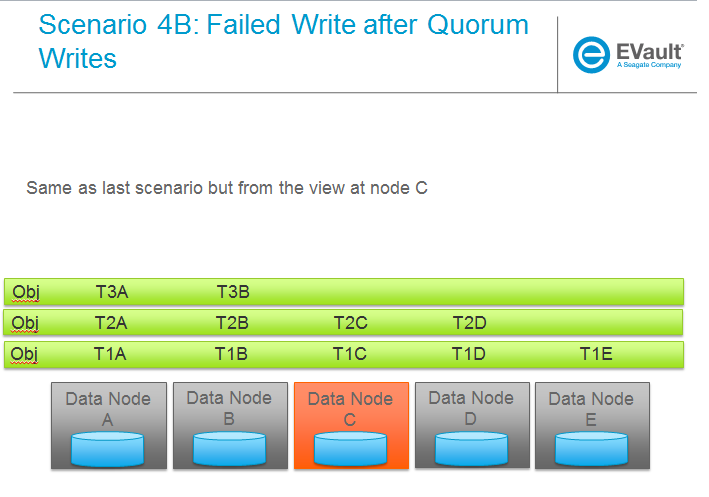
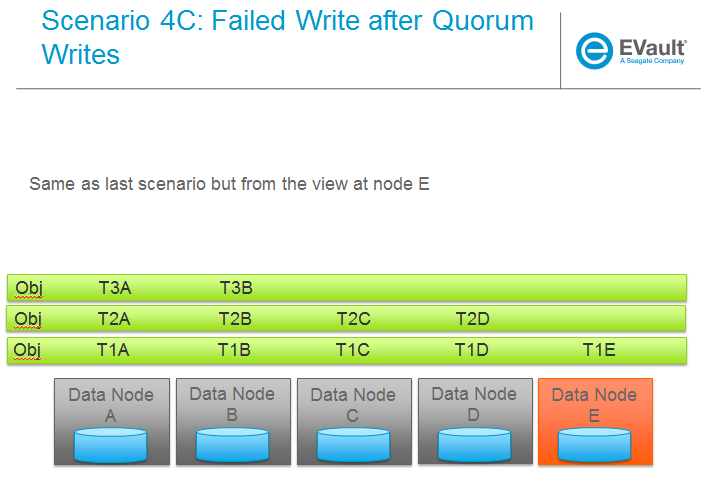
Node/Index Pairing
The following are some scenarios that help explain why the node/fragment index pairing is so important for both of the operations just mentioned.
Next Scenario:
Fragment Index Filename Encoding
Each storage policy now must include a transformation function that diskfile will use to build the filename to store on disk. This is required by the reconstructor for a few reasons. For one, it allows us to store fragment archives of different indexes on the same storage node. This is not hone in the happy path however is possible in some circumstances. Without unique filenames for the different EC archive files in a set, we would be at risk of overwriting one archive of index n with another of index m in some scenarios.
The transformation function for the replication policy is simply a NOP. For reconstruction, the index is appended to the filename just before the .data extension. An example filename for a fragment archive storing the 5th fragment would like this this:
1418673556.92690#5.data
Diskfile Refactoring
In order to more cleanly accomodate some of the low level on disk storage needs of EC (file names, .durable, etc) diskfile has some additional layering introduced allowing those functions that need EC specific changes to be isolated. TODO: Add detail here.
Reconstructor Job Pre-processing
Because any given suffix directory may contain more than one fragment archive index data file, the actions that the reconstructor needs to take are not as simple as either syncing or reverting data as is done with the replicator. Because of this, it is more efficient for the reconstructor to analyze what needs to be done on a per part/suffix/fragment index basis and then schedules a series of jobs that are executed by a single job processor (as opposed to having to clear scenarios of sync and revert as with the replicator). The main scenarios that the pre-processor is looking at:
- part dir with all FI’s matching the local node index this is the case where everything is where it belongs and we just need to compare hashes and sync if needed, here we sync with our partners
- part dir with one local and mix of others here we need to sync with our partners where FI matches the lcoal_id , all others are sync’d with their home nodes and then killed
- part dir with no local FI and just one or more others here we sync with just the FI that exists, nobody else and then all the local FAs are killed
So the main elements of a job that the job processor is handed include a list of exactly who to talk to, which suffix dirs are out of sync and which fragment index to care about. Additionally the job includes information used by both ssync and the reconstructor to delete, as required, .data files on the source node as needed. Basically the work done by the job processor is a hybrid of what the replicator does in update() and update_deleted().
The Act of Reconstruction
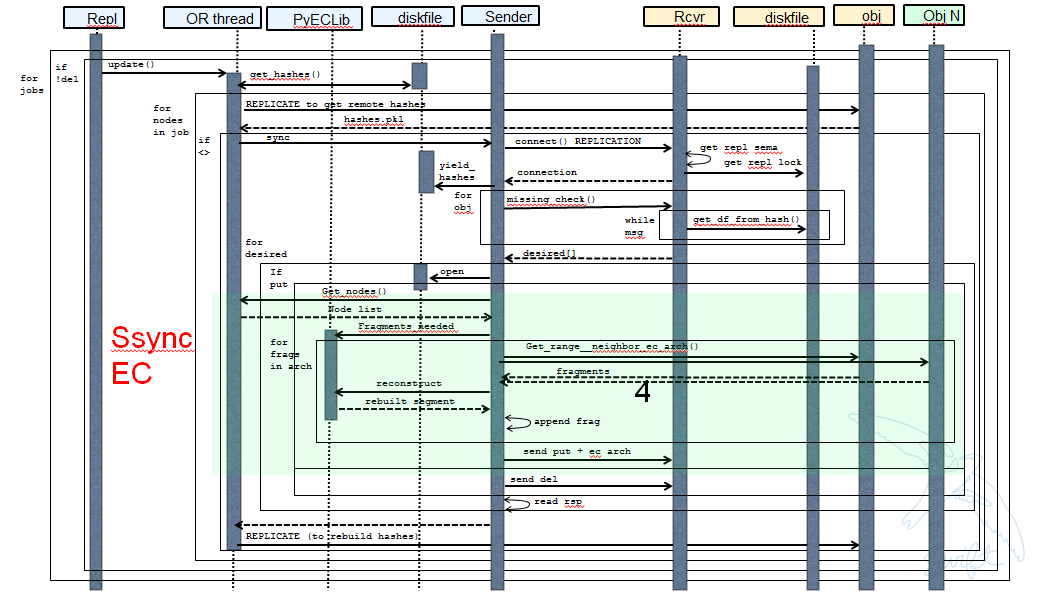
Reconstruction can be thought of sort of like replication but with an extra step in the middle. The reconstructor is hard-wired to use ssync to determine what is missing and desired by the other side however before an object sent over the wire it needs to be reconstructed from the remaining fragments as the local fragment is just that - a different fragment index than what the other end is asking for.
Thus there are hooks in ssync for EC based policies. One case would be for basic reconstruction which, at a high level, looks like this:
- ask PyECLib which nodes need to be contacted to collect other EC archives needed to perform reconstruction
- establish a connection to the target nodes and give ssync a DiskFileLike class that it can stream data from. The reader in this class will gather fragments from the nodes and use PyECLib to rebuild each segment before yielding data back to ssync
Essentially what this means is that data is buffered, in memory, on a per segment basis at the node performing reconstruction and each segment is dynamically reconstructed and delivered to ssync_sender where the send_put() method will ship them on over.
The following picture shows what the ssync changes to enable reconstruction. Note that there are several implementation details not covered here having to do with things like making sure that the correct fragment archive indexes are used, getting the metadata correctly setup for the reconstructed object, deleting files/suffix dirs as needed after reversion, etc., etc.
Reconstructor local data file cleanup
NOTE: This section is outdated, needs to be scrubbed. Do not read...
For the reconstructor cleanup is a bit different than replication because, for PUT consistency reasons, the object server is going to keep the previous .data file (if it existed) just in case the PUT of the most recent didn’t complete successfully on a quorum of nodes. That leaves the replicator with many scenarios to deal with when it comes to cleaning up old files:
a) Assuming a PUT worked (commit recevied), the reconstructor will need to delete the older timestamps on the local node. This can be detected locally be examining the TS.data and TS.durable filenames. Any TS.data that is older than TS.durable can be deleted.
b) Assuming a quorum or better and the .durable file didn’t make it to some nodes, the reconstructor will detect this (different hashes, further examination shows presence of local .durable file and remote matching ts files but not remote .durable) and simply push the .durable file to the remote node, basically replicating it.
c) In the event that a PUT was only partially complete but was still able to get a quorum down, the reconstructor will first need to reconstruct the object and then push the EC archives out such that all participating nodes have one, then it can delete the older timestamps on the local node. Once the object is reconstructed, a TS.durable file is created and committed such that each storage node has a record of the latest durable set much in the same way the multi-phase commit works in PUT.
d) In the event that a PUT was only partially complete and did not get a quorum, reconstruction is not possible. The reconstructor therefore needs to delete these files but there also must be an age factor to prevent it from deleting in flight PUTs. This should be the default behavior but should be able to be overridden in the event that an admin may want partials kept for some reason (easier DR maybe). Regardless, logging when this happens makes a lot of sense. This scenario can be detected when the reconstructor attempts to reconstruct because it notices it does not have a TS.durable for a particular TS.data and gets enough 409s that it can’t feed PyECLib enough data to reconstruct (it will need to feed PyECLib what it gets and PYECLib will tell it if there’s not enough though). Whether we delete the .data file, mark it somehow so we don’t keep trying to reconstruct is TBD.
Reconstructor rebalance
Current thinking is that there should be no special handling here above and beyond the changes described in the handoff reversion section.
Reconstructor concurrency
There are 2 aspects of concurrency to consider with the reconstructor:
- concurrency of the daemon
This means the same for the reconstructor as it does for the replicator, the size of the GreenPool used for the ‘update’ and ‘update_deleted’ jobs.
- overall parallelism of partition reconstruction
With regards to node-node communication we have already covered the notion that the reconstructor cannot simply check in with its neighbors to determine what action is should take, if any, on its current run because it needs to know the status of the full stripe (not just the status of one or two other EC archives).
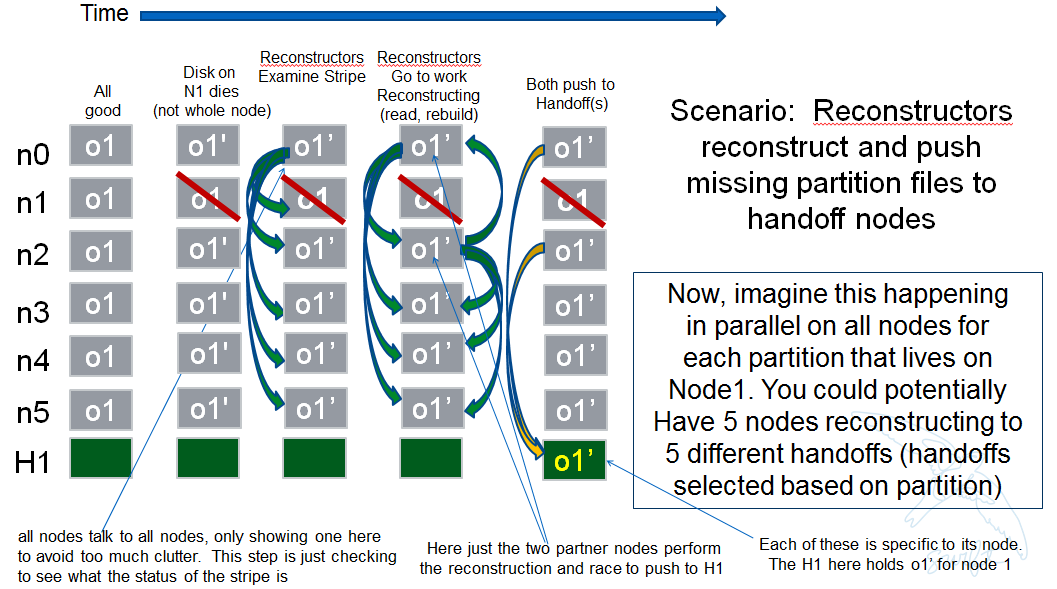
However, we do not want it to actually take action on all other nodes. In other words, we do want to check in with every node to see if a reconstruction is needed and in the event that it is, we dont want to attempt reconstruction on partner nodes, its left and right neighbors. This will minimize reconstruction races but still provide for redundancy in addressing the reconstruction of an EC archive.
In the event that a node (HDD) is down, there will be 2 partners for that node per partition working the reconstruction thus if we had 6 primaries, for example, and an HDD dies on node 1. We only want nodes 0 and 2 to add jobs to their local reconstructor even though when they call obj_ring.get_part_nodes(int(partition)) to get a list of other members of the stripe they will get back 6 nodes. The local node will make its decision as to whether to add a reconstruction job or not based on its position in the node list.
In doing this, we minimize the reconstruction races but still enable all 6 nodes to be working on reconstruction for a failed HDD as the partitions will be distributed amongst all of the nodes therefore the node with the dead HDD will potentially have all other nodes pushing reconstructed EC archives to the handoff node in parallel on different partitions with every partition having at most 2 nodes racing to reconstruct its archives.
The following picture illustrates the example above.
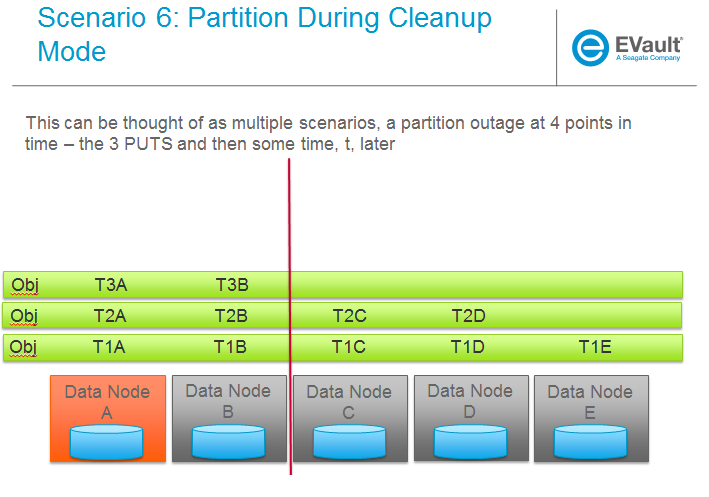
SCENARIOS:
The following series of pictures illustrate the various scenarios more completely. We will use these scenarios against each of the main functions of the reconstructor which we will define as:
- Reconstructor framework (daemon)
- Reconstruction (Ssync changes per spec sequence diagram)
- Reconstructor local data file cleanup
- Rebalance
- Handoff reversion (move data back to primary)
TODO: Once designs are proposed for each of the main areas above, map to scenarios below for completeness.
Trello Tasks for this section:
* 3.3.7.1: Reconstructor framework
* 3.3.7.2: Ssync changes per spec sequence diagram
* 3.3.7.3: Reconstructor local data file cleanup
* 3.3.7.4: Node to node communication and synchrinozation on stripe status
* 3.3.7.5: Reconstructor rebalance
* 3.3.7.6: Reconstructor handoff reversion
* 3.3.7.7: Add conf file option to never delete un-reconstructable EC archives
3.3.8 Auditor
Because the auditor already operates on a per storage policy basis, there are no specific auditor changes associated with EC. Each EC archive looks like, and is treated like, a regular object from the perspective of the auditor. Therefore, if the auditor finds bit-rot in an EC archive, it simply quarantines it and the EC reconstructor will take care of the rest just as the replicator does for replication policies. Because quarantine directories are already isolated per policy, EC archives have their own quarantine directories.
3.3.9 Performance
Lots of considerations, planning, testing, tweaking, discussions, etc., etc. to do here
Trello Tasks for this section:
* 3.3.9.1: Performance Analysis
3.3.10 The Ring
I think the only real thing to do here is make rebalance able to move more than 1 replica of a given partition at a time. In my mind, the EC scheme is stored in swift.conf, not in the ring, and the placement and device management doesn’t need any changes to cope with EC.
We also want to scrub ring tools to use the word “node” instead of “replicas” to avoid confusion with EC.
Trello Tasks for this section:
* 3.3.10.1: Ring changes
3.3.11 Testing
Since these tests aren’t always obvious (or possible) on a per patch basis (because of dependencies on other patches) we need to document scenarios that we want to make sure are covered once the code supports them.
3.3.11.1 Probe Tests
The Trello card for this has a good starting list of test scenarios, more should be added as the design progresses.
3.3.11.2 Functional Tests
To begin with at least, it believed we just need to make an EC policy the default and run existing functional tests (and make sure it does that automatically)
Trello Tasks for this section:
* 3.3.11.1: Required probe test scenarios
* 3.3.11.2: Required functional test scenarios
3.3.12 Container Sync
Container synch assumes the use of replicas. In the current design, container synch from an EC policy would send only one fragment archive to the remote container, not the reconstructed object.
Therefore container sync needs to be updated to use an internal client instead of the direct client that would only grab a fragment archive.
Trello Tasks for this section:
* 3.3.12.1: Container synch from an EC containers
3.3.13 EC Configuration Helper Tool
Script to include w/Swift to help determine what the best EC scheme might be and what the parameters should be for swift.conf.
Trello Tasks for this section:
* 3.3.13.1: EC Configuration Helper Tool
3.3.14 SAIO Updates
We want to make sure its easy for the SAIO environment to be used for EC development and experimentation. Just as we did with policies, we’ll want to update both docs and scripts once we decide what exactly what we want it to look like.
For now lets start with 8 total nodes (4 servers) and a 4+2+2 scheme (4 data, 2 parity, 2 handoffs)
Trello Tasks for this section:
* 3.3.13.1: SAIO Updates (IMPLEMENTED)
3.4 Alternatives¶
This design is ‘proxy centric’ meaning that all EC is done ‘in line’ as we bring data in/out of the cluster. An alternate design might be ‘storage node centric’ where the proxy is really unaware of EC work and new daemons move data from 3x to EC schemes based on rules that could include factors such as age and size of the object. There was a significant amount of discussion on the two options but the former was eventually chosen for the following main reasons:
EC is CPU/memory intensive and being ‘proxy centric’ more closely aligns with how providers are planning/have deployed their HW infrastructure
Having more intelligence at the proxy and less at the storage node is more closely aligned with general Swift architectural principles
The latter approach was limited to ‘off line’ EC meaning that data would always have to make the ‘trip’ through replication before becoming erasure coded which is not as usable for many applications
The former approach provides for ‘in line’ as well as ‘off line’ by allowing the application to store data in a replication policy first and then move that data at some point later to EC by copying the data to a different container. There are thoughts/ideas for alternate means for allowing a data to change the policy of a container that are not covered here but are recognized to be possible with this scheme making it even easier for an application to control the data durability policy.
Alternate Reconstructor Design
An alternate, but rejected, proposal is archived on Trello.
Key concepts for the REJECTED proposal were:
Perform auditing at the fragment level (sub segment) to avoid having the smallest unit of work be an EC archive. This will reduce reconstruction network traffic
Today the auditor quarantines an entire object, for fragment level rebuild we need an additional step to identify which fragment within the archive is bad and potentially quarantine in a different location to project the archive from deletion until the Reconstructor is done with it
Today hashes.pkl only identifies a suffix directory in need of attention. For fragment level rebuild, the reconstructor needs to have additional information as its not just syncing at the directory level: Needs to know which fragment archive in the suffix dir needs work Needs to know which segment index within the archive is bad Needs to know the fragment index of the archive (the EC archives position within the set)
Perform reconstruction on the local node, however preserve the push model by having the remote node communicate reconstruction information via a new verb. This will reduce reconstruction network traffic. This could be really bad wrt overloading the local node with reconstruction traffic as opposed to using all the compute power of all systems participating in the partitions kept on the local node.
Alternate Reconstructor Design #2
The design proposal leverages the REPLICATE verb but introduces a new hashes.pkl format for EC and, for readability, names this file ec_hashes.pkl. The contents of this file will be covered shortly but it essentially needs to contain everything that any node would need to know in order to make a pass over its data and decided whether to reconstruct, delete, or move data. So, for EC, the standard hashes.pkl file and/or functions that operate on it are not relevant.
The data in ec_hashes.pkl has the following properties:
- needs to be synchronized across all nodes
- needs to have complete information about any given object hash to be valid for that hash
- can be complete for some object hashes and incomplete for others
There are many choices for achieving this ranging from gossip methods to consensus schemes. The proposed design leverages the fact that all nodes have access to a common structure and accessor functions that are assumed to be synchronized (eventually) such that any node position in the list can be used to select a master for one of two operations that require node-node communication: (1) ec_hashes.pkl synchronization and (2) reconstruction.
ec_hashes.pkl synchronization
At any given point in time there will be one node out of the set of nodes returned from get_part_nodes() that will act as the master for synchronizing ec_hashes.pkl information. The reconstructor, at the start of each pass, will use a bully style algorithm to elect the hash master. When each reconstructor starts a pass it will send an election message to all nodes with a node index lower than its own. If unable to connect with said nodes then it assumes the role of hash master. If any nodes with lower index reply then it continues with the current pass, processing its objects baed on current information in its ec_hashes.pkl. This bully-like algoithm won’t actually prevent 2 masters from running at the same time (for example nodes 0-2 could all be down so node 3 starts as master and then one of the nodes comes back up, it will also start the hash synchronization process). Note that this does not cause functional issues, its just a bit wasteful but saves us from implementing a more complex consensus algorithm thats not deemed to be worth the effort.
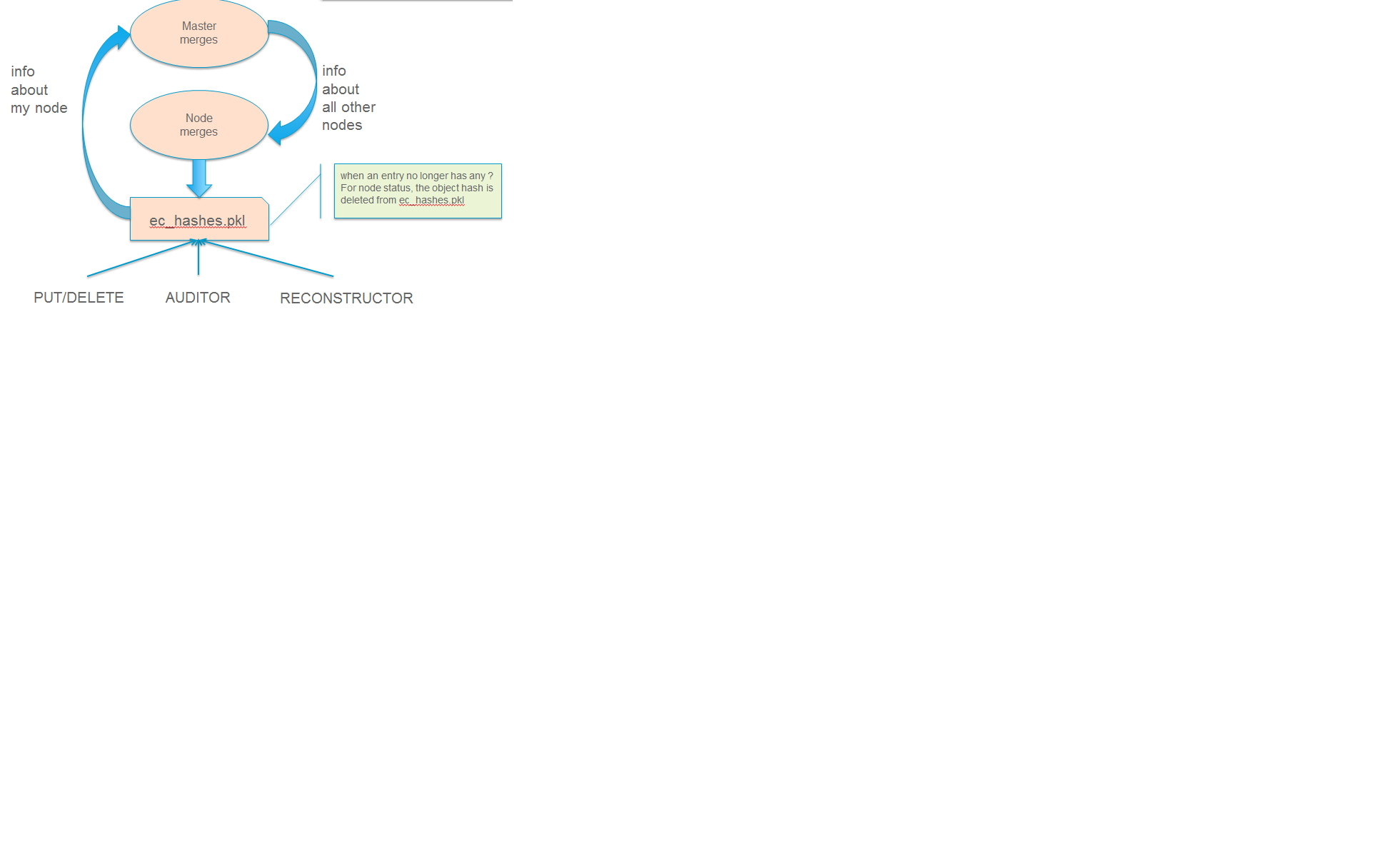
The role of the master will be to:
- send REPLCIATE to all other nodes in the set
- merge results
- send new variation of REPLICATE to all other nodes
- nodes merge into their ec_hashes.pkl
In this manner there will be typically one node sending 2 REPLICATE verbs to n other nodes for each pass of the reconstructor so a total of 2(n-1) REPLICATE so O(n) versus O(1) for replication where 3 nodes would be sending 2 messages each for a constant 6 messages per pass. Note that there are distinct differences between the merging done by the master after collecting node pkl files and the merging done at the nodes after receiving the master version. When the master is merging, it is only updating the master copy with new information about the sending node. When a node is merging from master, it is only updating information about all other nodes. In other words, the master is only interested in hearing information from a node about that node itself and any given node is only interested in learning about everybody else. More on these merging rules later.
At any given point in time the ec_hashes.pkl file on a node can be in a variety of states, it is not required that, although a synchronized set was sent by the master, that the synchronized version be inspected by participating nodes. Each object hash within the ec_hashes.pkl will have information indicating whether that particular entry is synchronized or not, therefore it may be the case that a particular pass of a reconstructor run parse an ec_hashes.pkl file and only find some percentage N of synchronized entries where N started at 100% and dropped from there as changes were made to the local node (objects added, objects quarantined). An example will be provided after defining the format of the file.
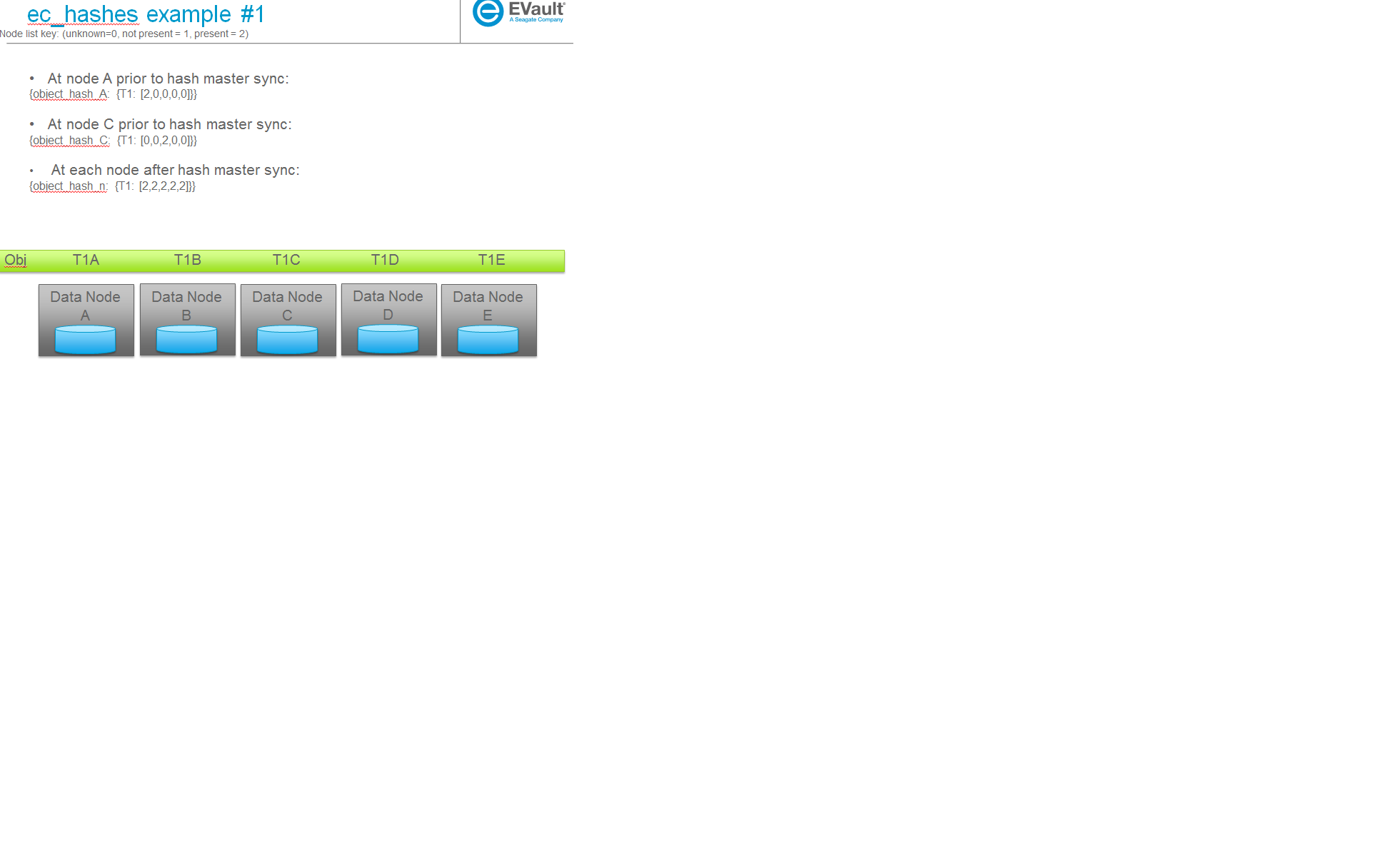
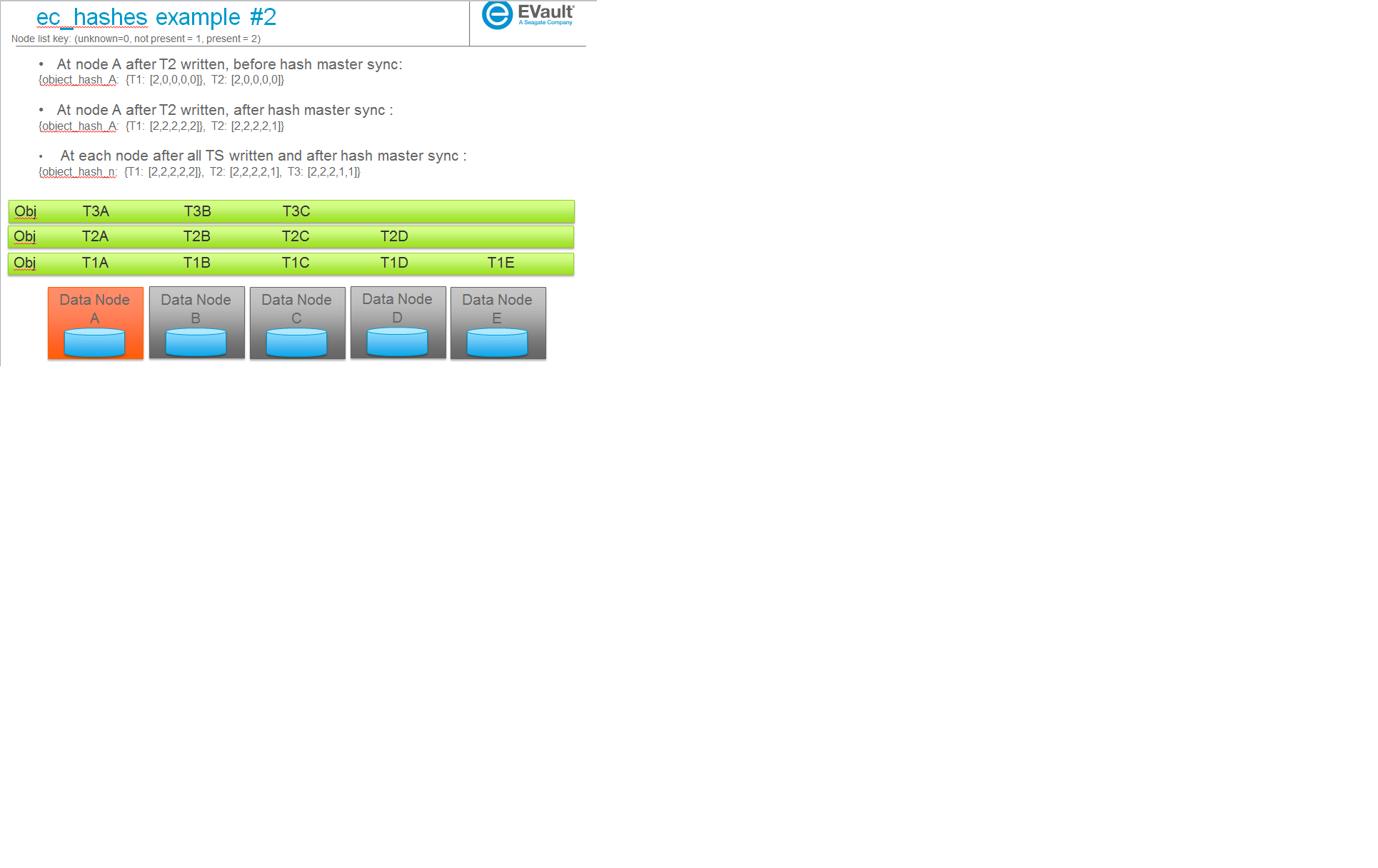
ec_hashes data structure
- {object_hash_0: {TS_0: [node0, node1, ...], TS_n: [node0, node1, ...], ...},
- object_hash_1: {TS_0: [node0, node1, ...], TS_n: [node0, node1, ...], ...}, object_hash_n: {TS_0: [node0, node1, ...], TS_n: [node0, node1, ...], ...}}
where nodeX takes on values of unknown, not present or present such that a reconstructor parsing its local structure can determine on an object by object basis which TS files exist on which nodes, which ones it is missing on or if it has incomplete information for that TS (a node value for that TS is marked as unknown). Note that although this file format will contain per object information, objects are removed from the file by the local nodes once the local node has seen information from all other nodes for that entry. Therefore the file will not contain an entry for every object in the system but instead a transient entry for every object while its being accepted into the system (having its consistency wrt EC verified).
The new ec_hashes.pkl is subject to several potential writers including the hash master, its own local reconstructor, the auditor, the PUT path, etc., and will therefore be using the same locking that hashes.pkl uses today. The following illustrates the ongoing updates to ec_hashes.pkl
As the ec_hashes.pkl file is updated, the following rules apply:
As a hash master updating a local master file with any single node file: (recall the goal here is to update the master with info about the incoming node)
- data is never deleted (ie if an object hash or TS key exists in master but does not in the incoming dictionary, the entry is left in tact)
- data can be added (if an object hash or TS key exists in an incoming dicitonary but does not exist in master it is added)
- where keys match, only the node index in the TS list for the incoming data is affected and that data is replaced in master with the incoming information
As a non-master node merging from the master: (recall that the goal here is to have this node learn the other nodes in the cluster)
- an object hash is deleted as soon as all nodes are maked present
- data can be added, same as above
- where keys match, only other the indicies in the TS list for the incoming data is affected and that data is replaced with the incoming information
Some examples
The following are some example scenarios (used later to help explain use cases) and their corresponding ec_hashes data structures.
4. Implementation¶
Assignee(s)¶
There are several key contributors, torgomatic is the core sponsor
Work Items¶
Repositories¶
Using Swift repo
Servers¶
N/A
DNS Entries¶
N/A
5. Dependencies¶
As mentioned earlier, the EC algorithms themselves are implemented externally in multiple libraries. See the main site for the external work at PyECLib
PyECLib itself is already an accepted requirement.
Work is ongoing to make sure that additional package depend ices for PyECLib are ongoing... There is a linux package, liberasurecode, that is also being developed as part of this effort and is needed by PyECLib. Getting it added for devstack tempest tests and unittests slaves is currently WIP by tsg
Trello Tasks for this section:
* 5.1: Enable sysmeta on object PUT (IMPLEMENTED)